步进电机(Stepper Motor)
定义:通过脉冲信号控制转子步进式转动的电机,每接收一个脉冲信号,转子便旋转一个固定角度(步距角)。
驱动原理:依靠开环控制系统,无需位置反馈装置。脉冲信号的频率决定转速,脉冲数量决定旋转角度。
典型结构:定子绕组通电后产生磁场,吸引转子齿部按固定步距转动,常见步距角为 1.8°、0.9° 等。
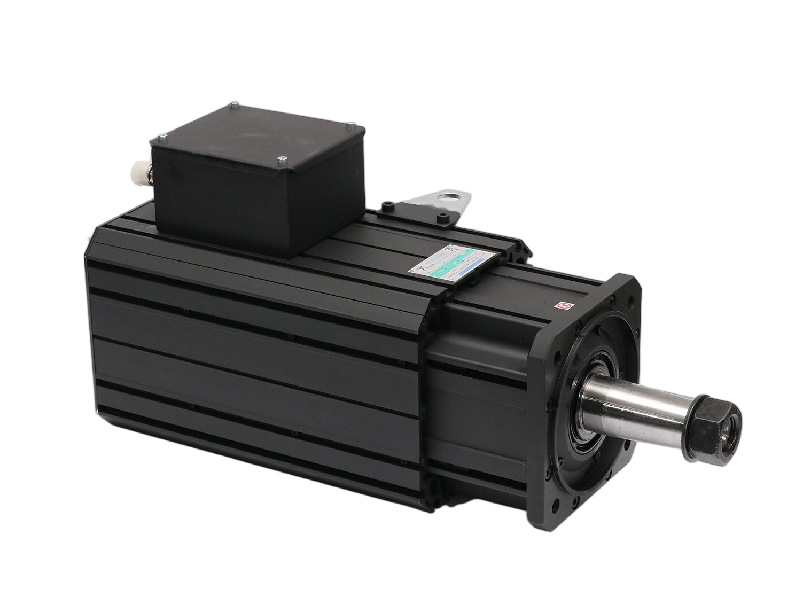
伺服电机(Servo Motor)
定义:能将电信号精确转换为机械运动的执行元件,需配合闭环控制系统。
驱动原理:通过编码器实时反馈转子位置和速度,驱动器将指令信号与反馈信号对比后调整输出,实现精准控制。
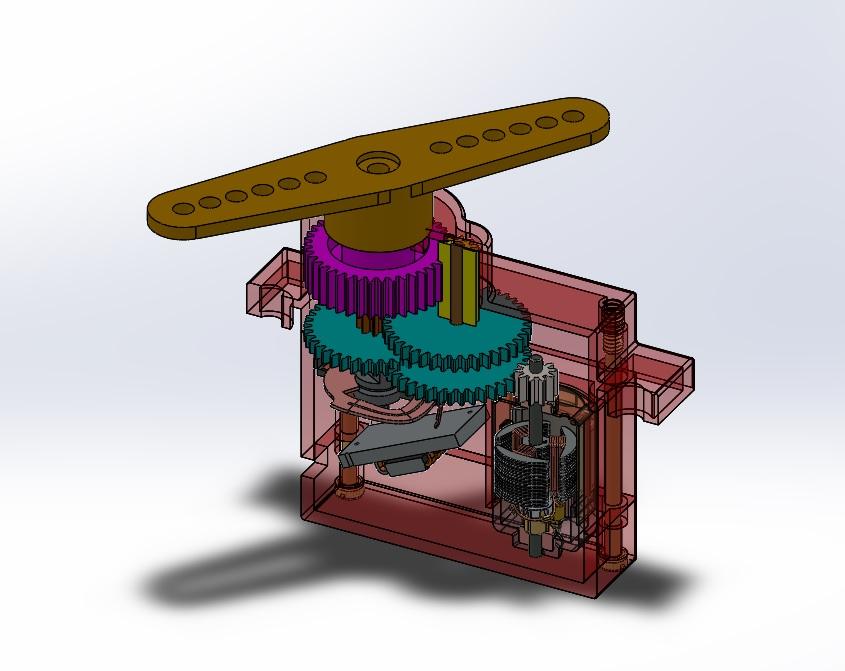
典型结构:由电机本体、编码器(如光电编码器、旋转变压器)和驱动器组成,形成 “指令 - 执行 - 反馈” 闭环。
无需反馈装置,驱动器直接发送脉冲信号,结构简单、成本低。
典型场景:3D 打印机(X/Y 轴移动)、小型数控机床(非高精度切削),因开环控制无法实时修正误差,适合对精度要求不高的场景。
伺服电机:闭环控制的 “精准主义”
编码器实时反馈位置(如 20 位编码器分辨率达 1048576 脉冲 / 转),驱动器通过 PID 算法调整电流,实现 “误差补偿”。
典型场景:工业机械臂(重复定位精度 ±0.01mm)、锂电池极片切割设备(速度 200m/min 时位置误差<0.1mm),需高精度同步控制的场合。
低成本自动化:如自动化流水线的传送带驱动(速度≤100rpm,定位精度 ±1mm)。
简易数控设备:小型雕刻机(加工精度 ±0.5mm)、激光打标机(非精密图案)。
消费电子:打印机进纸机构、摄像头云台(角度控制精度 ±1°)。
高端制造业:汽车发动机装配线(螺栓拧紧力矩控制 ±0.5N・m)、航空航天部件加工(曲面精度 ±0.02mm)。
机器人领域:协作机器人(关节运动平滑性要求高)、AGV 物流车(路径跟踪误差<5mm)。
新能源设备:光伏板追踪系统(角度控制精度 ±0.1°)、风电变桨系统(风速变化时桨叶角度实时调整)。
步进电机系统(驱动器 + 电机)成本约为伺服系统的 1/3-1/2(如 400W 步进系统约 500 元,同功率伺服系统约 1500 元)。
伺服系统因编码器、高精度驱动器成本较高,适合预算充足的高端场景。
维护难度
步进电机:无反馈装置,维护简单,只需定期润滑轴承(寿命 5000-10000 小时)。
伺服电机:需定期检查编码器接线(避免信号干扰)、驱动器散热(温度超过 50℃需散热),维护成本略高。
步进电机的升级:
细分驱动技术(如 128 细分)可将步距角从 1.8° 细化至 0.014°,接近伺服电机精度,但仍无法完全消除累积误差。
伺服电机的普及:
永磁同步伺服电机(PMSM)因效率高(≥90%)、体积小,逐步替代传统异步伺服;
集成化趋势(如伺服驱动器与 PLC 一体化)降低系统复杂度,推动中小型设备应用。
若需求为 “低成本、低精度、低速”,选步进电机;
若需求为 “高精度、高响应、恒转矩”,选伺服电机。
典型案例:工业大型风扇中,若需根据温度自动调节转速(精度 ±5%),可选伺服电机;若仅需固定转速启停,步进电机即可满足。

0574-87668083
18042069740