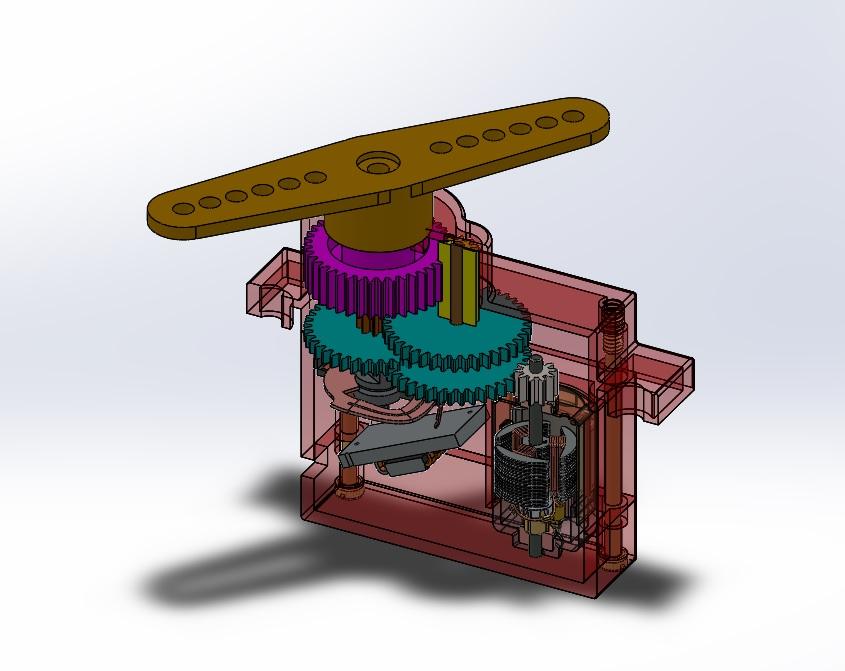
伺服电机是一种通过电信号控制运转的电机,可将电信号转化为电机轴的角位移或角速度输出,在自动化控制、精密机械等领域应用广泛。其分类方式多样,以下从不同角度进行详细介绍:
按工作原理分类
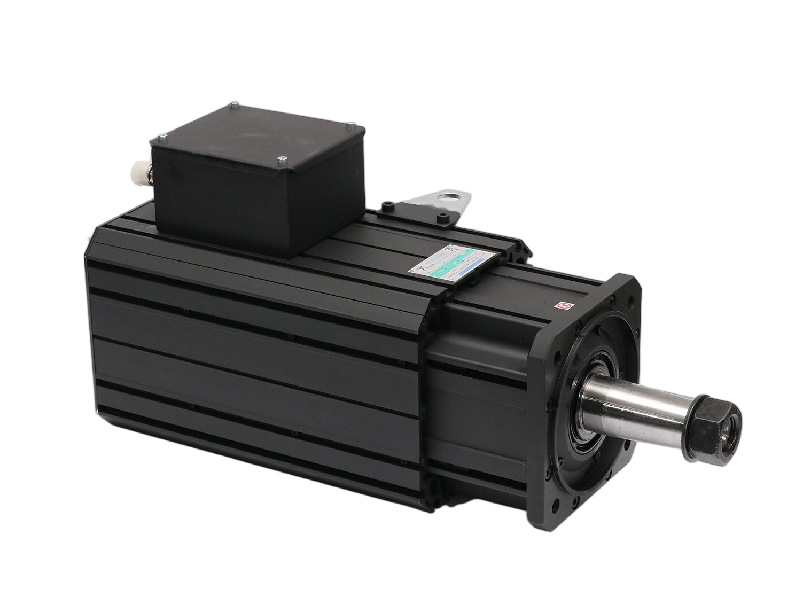
永磁直流伺服电机:采用永磁体作为定子,转子为电枢,通过改变电枢电压或电流来控制转速和转矩。具有响应速度快、控制精度高、低速运行平稳等特点,常用于机器人、数控机床、航空航天等高精度控制场景。兴泰永磁伺服专用电机就是这类伺服电机的代表。
电磁直流伺服电机:定子由电磁绕组构成,通过励磁电流产生磁场。相比永磁式,其磁场强度可调节,适用于需要大范围调速或大功率输出的场合,如工业自动化生产线中的大型机械驱动。
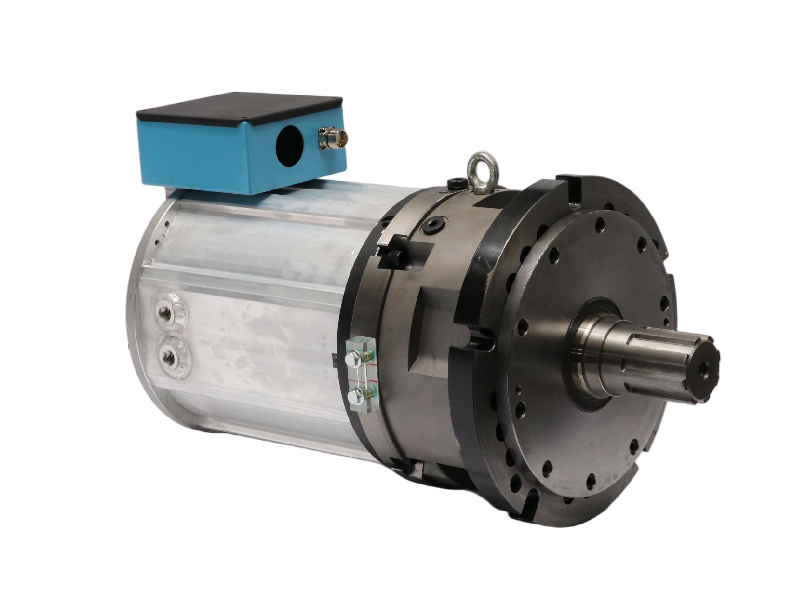
同步交流伺服电机:转子转速与定子旋转磁场同步,通常采用永磁体(永磁同步电机,PMSM)或磁阻材料(磁阻同步电机)。永磁同步电机具有效率高、功率密度大、动态性能好的优势,广泛应用于新能源汽车驱动、机器人关节驱动等领域;磁阻同步电机则通过转子磁阻变化产生转矩,结构简单、成本较低。
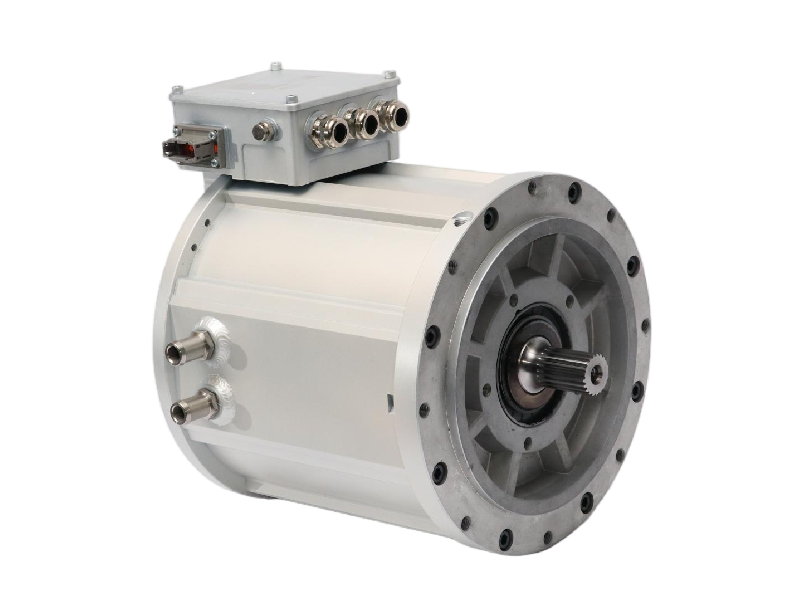
异步交流伺服电机(感应伺服电机):基于电磁感应原理工作,转子转速略低于定子磁场转速。其结构坚固、维护方便,常用于对精度要求相对较低但需要大转矩的场景,如风机、泵类设备的调速控制。
按使用场景和功能分类
通用伺服电机:适用于大多数工业自动化场景,如机床进给系统、包装机械、纺织设备等,可实现位置、速度和转矩的精确控制,通常搭配伺服驱动器使用。
机床伺服电机:针对数控机床的高刚性、高精度需求设计,具备高速响应和低振动特性,确保加工零件的表面光洁度和尺寸精度。
机器人伺服电机:要求体积小、重量轻、转矩密度高,且能频繁启停和快速换向,如协作机器人的关节驱动电机,常集成编码器以实现实时位置反馈。
航空航天伺服电机:需满足轻量化、耐高温、抗辐射等严苛环境要求,常用于飞行器舵机、卫星天线驱动等场景,可靠性要求极高。
医疗设备伺服电机:如 CT 扫描仪的旋转驱动、手术机器人的精密动作控制,要求低噪音、低振动且运行稳定,避免对医疗操作或成像质量产生干扰。
按控制方式分类
位置控制伺服电机:通过接收脉冲信号或数字指令,精确控制电机轴的旋转角度或位移,常用于需要定位的场景,如 3D 打印机的喷头移动、自动化生产线的物料分拣机械臂。
速度控制伺服电机:主要用于维持电机以恒定速度运行,或根据指令快速调整转速,如输送带上的电机需根据物料流量调节速度,风机的变频调速控制。
转矩控制伺服电机:精确控制输出转矩,常用于需要恒力或恒力矩的场景,如线缆卷绕设备(保持张力恒定)、注塑机的螺杆驱动(控制注射压力)。
按结构特点分类
旋转式伺服电机:最常见的类型,电机轴做旋转运动,输出角位移或角速度,如上述的直流、交流伺服电机,广泛应用于各类旋转驱动场景。
直线式伺服电机:直接输出直线运动,无需通过丝杠、齿轮等机械传动转换,减少传动损耗和误差,具有响应速度快、定位精度高的特点,常用于数控机床的直线进给轴、半导体制造设备的精密平台移动。
微型伺服电机:功率通常在数瓦到数十瓦,尺寸小巧(如直径 10-30mm),常用于玩具机器人、小型无人机的舵机控制。
小型伺服电机:功率数十瓦到数百瓦,适用于 3C 产品生产线的小型机械臂、自动化检测设备。
中型伺服电机:功率数百瓦到数千瓦,常见于数控机床、工业机器人的主驱动轴。
大型伺服电机:功率数千瓦以上,用于大型注塑机、矿山机械、船舶推进系统等大功率场景。
其他分类方式
按反馈方式:分为带编码器(如增量式、绝对式编码器)和不带编码器的伺服电机,编码器用于实时反馈位置和速度,实现闭环控制。
按冷却方式:包括自然冷却、强制风冷、液冷等,大功率伺服电机常需液冷或强制风冷以散热。
总结
伺服电机的分类需结合工作原理、应用场景、控制需求等多维度考量。实际选型时,需根据负载特性(如转矩、惯量)、控制精度、环境要求(如温度、防护等级)等因素综合判断,以选择最适合的类型。例如,高精度定位场景优先选择带绝对式编码器的永磁同步伺服电机,而大功率工业驱动可能更倾向于异步交流伺服电机或电磁直流伺服电机。

0574-87668083
18042069740